
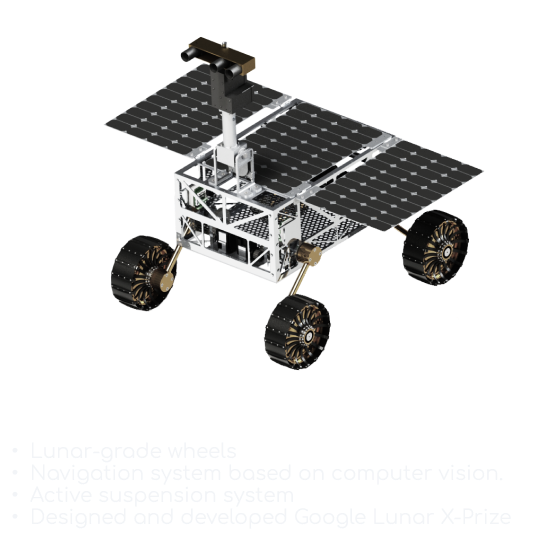
DIANA was born by initiative of Professor Emeritus Giancarlo Genta, with the ambitious goal to compete for the Google Lunar X-Prize together with Team Italia. AMALIA is an advanced lunar exploration vehicle. AMALIA represents a significant achievement in space robotics, featuring cutting-edge technology and robust design to withstand the challenging lunar environment. Equipped with various instruments and mobility systems, AMALIA can traverse the lunar surface, collect data, and perform experiments, surviving on the harsh moon surface for two weeks.
AMALIA II represents an evolution in their pursuit of lunar exploration excellence. This iteration of the rover builds upon the experience and lessons learned from the first AMALIA prototype. It incorporates enhanced technology, improved mobility systems, and more advanced instruments for data collection and experimentation on the lunar surface.
A competition organized by the X-Prize foundation and sponsored by Google that aimed to open the doors of space exploration to entrepreneurs and Teams, giving them the opportunity to showcase their work and business models by completing a full Lunar mission, from the launch and landing, to lunar walk and data transmission.
Unfortunately, the Google Lunar X-Prize competition ends without winners. In order to preserve the aquired know-how, DIANA decides to pivot to student competitions. T0-R0 enters initial development phase.
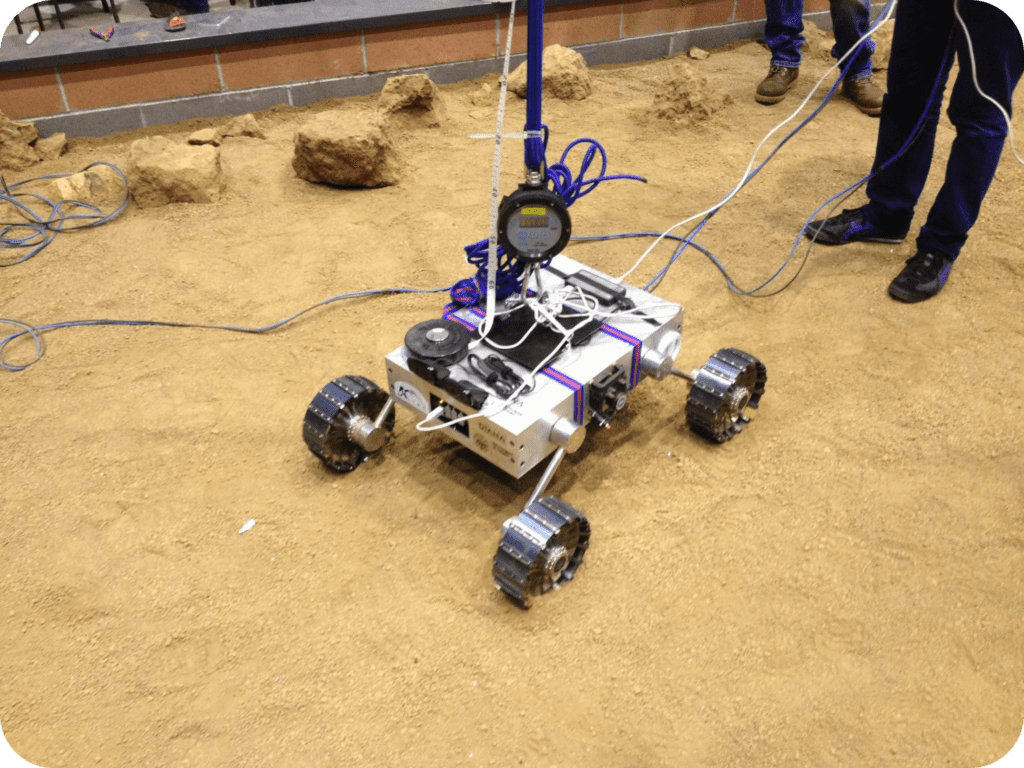
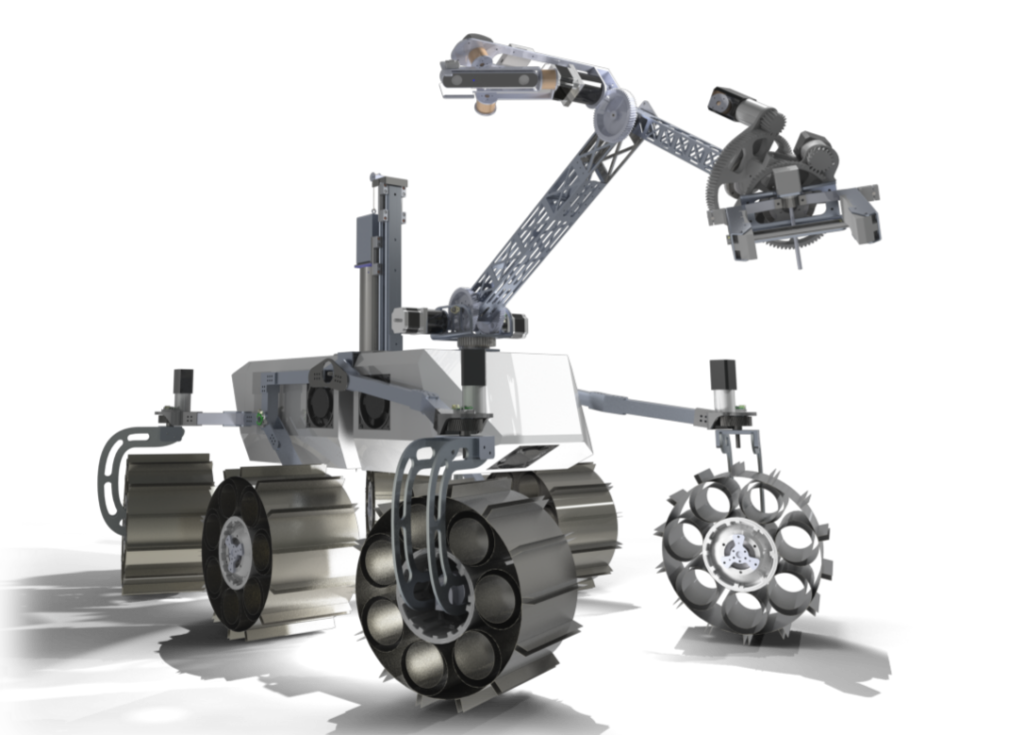
In 2015, Team DIANA introduced the T0-R0 project, their first rover developed with the goal of participating in the Rover Challenge Series competitions. T0-R0 was designed and built keeping a low budget profile.
T0-R0 was equipped with:
- Six wheels rocker-boogie mobility system;
- A robotic arm with at least 6 DoF;
- Manually exchangeable end effectors;
- Power supply based on battery packs.
DIANA is the first italian team to participate at European Rover Challenge
TRINITY is the product of the heritage and expertise of ten
years of hard work and keen research, carried out with a clear
vision and a specific approach. TRINITY is based on a strongly modular design. From previous experiences the Team learnt that a modular design dramatically reduces development and production times and allows to easily perform modifications on the existing platform for upgrades and fixes.

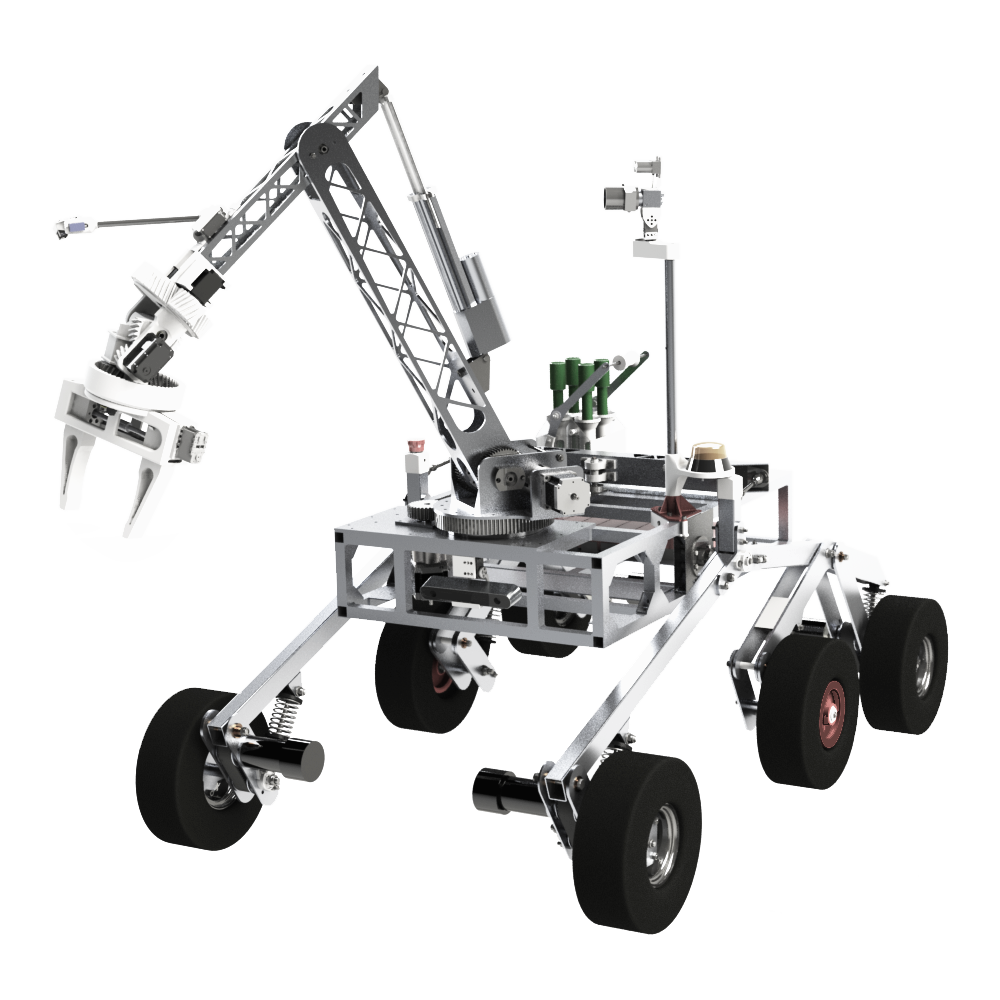
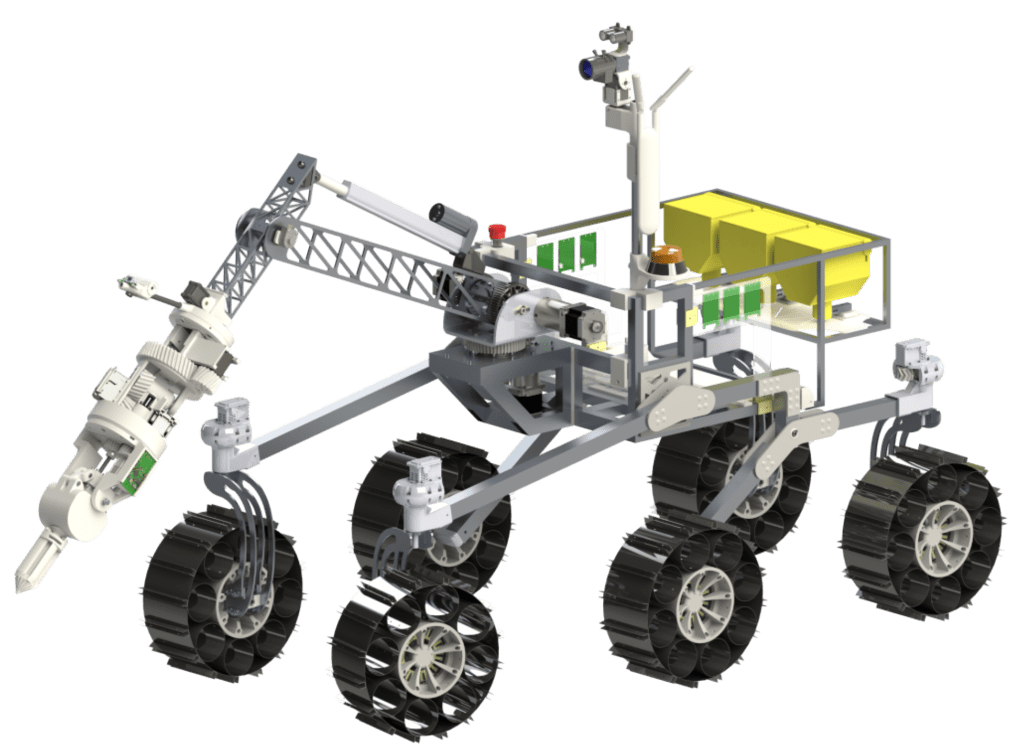
ARDITO is DIANA's fourth rover, equipped with a robotic arm and a drilling system. Improving on the previous designs, ARDITO is the most ambitious rover platform that DIANA has developed so far for student competitions.




DIANA participated in a consortium of research groups and student teams from Politecnico di Torino (PoliToMoon) at the ESA ESRIC 2021 Space Resources Challenge


![]()

![]()
A delegation of DIANA members presented a research paper at the International Astronautical Congress 2022 in Paris.



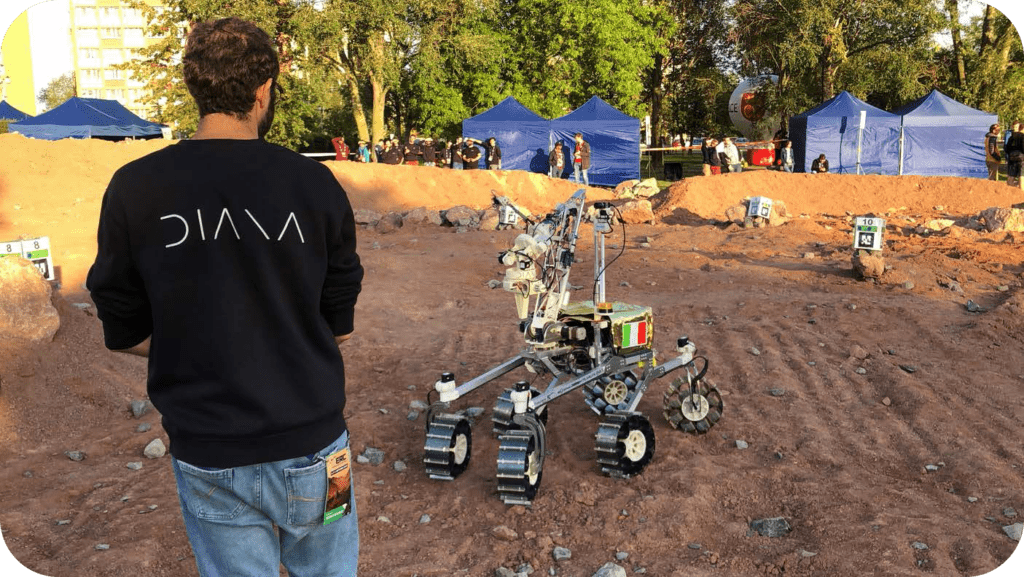
ERC 2023 was the third consecutive competition for ARDITO. Thanks to the experience gained from previous competitions and the improvements made to the entire rover, DIANA secured the eighth position in the rankings.


DIANA presented two new research papers at International Astronautical Congress 2023, in Baku.