ARDITO
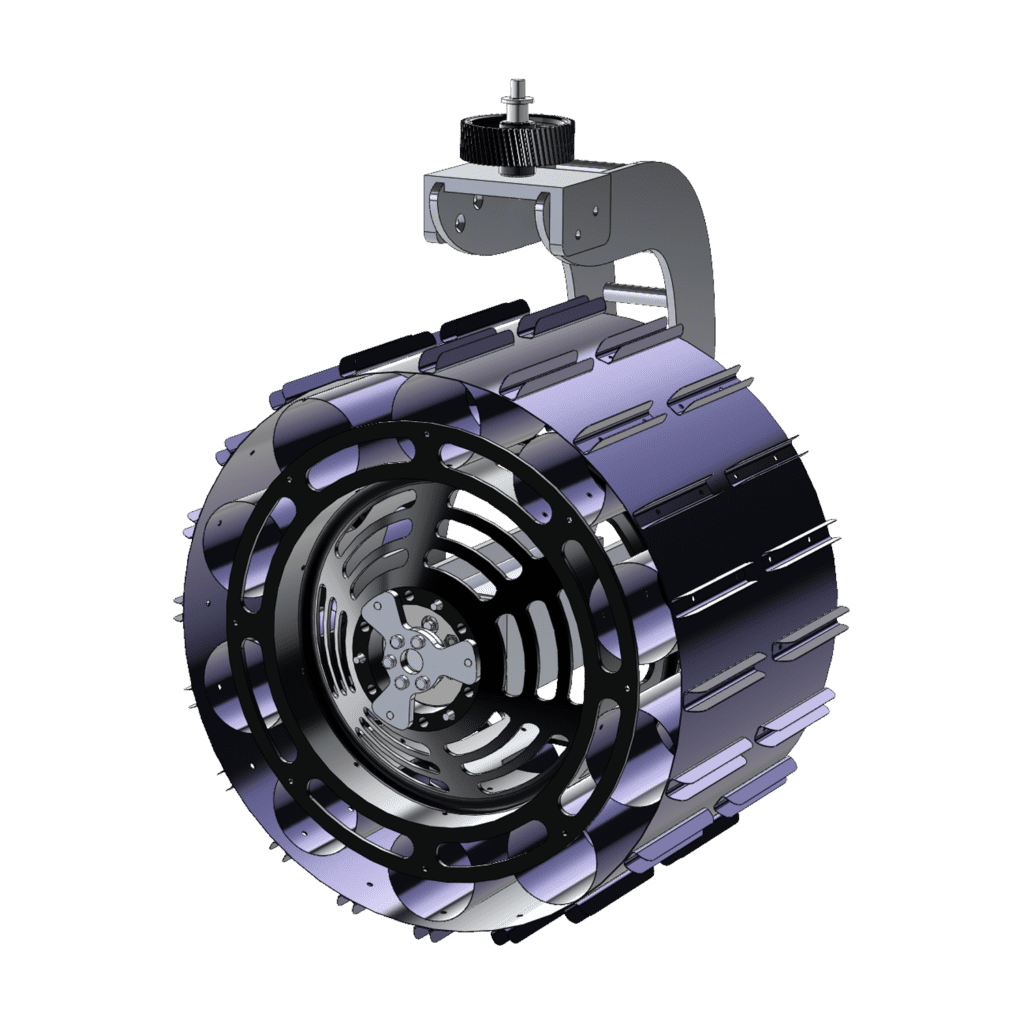
MOBILITY SYSTEM
ARDITO can move at a maximum speed of 36 km/h and overcome obstacles up to 50 cm in height through its powerful wheels, which are also able to absorb and dampen shocks. Thanks to its six-wheel drive system and autonomous navigation technology, the rover can also operate in rough and sloped terrain.
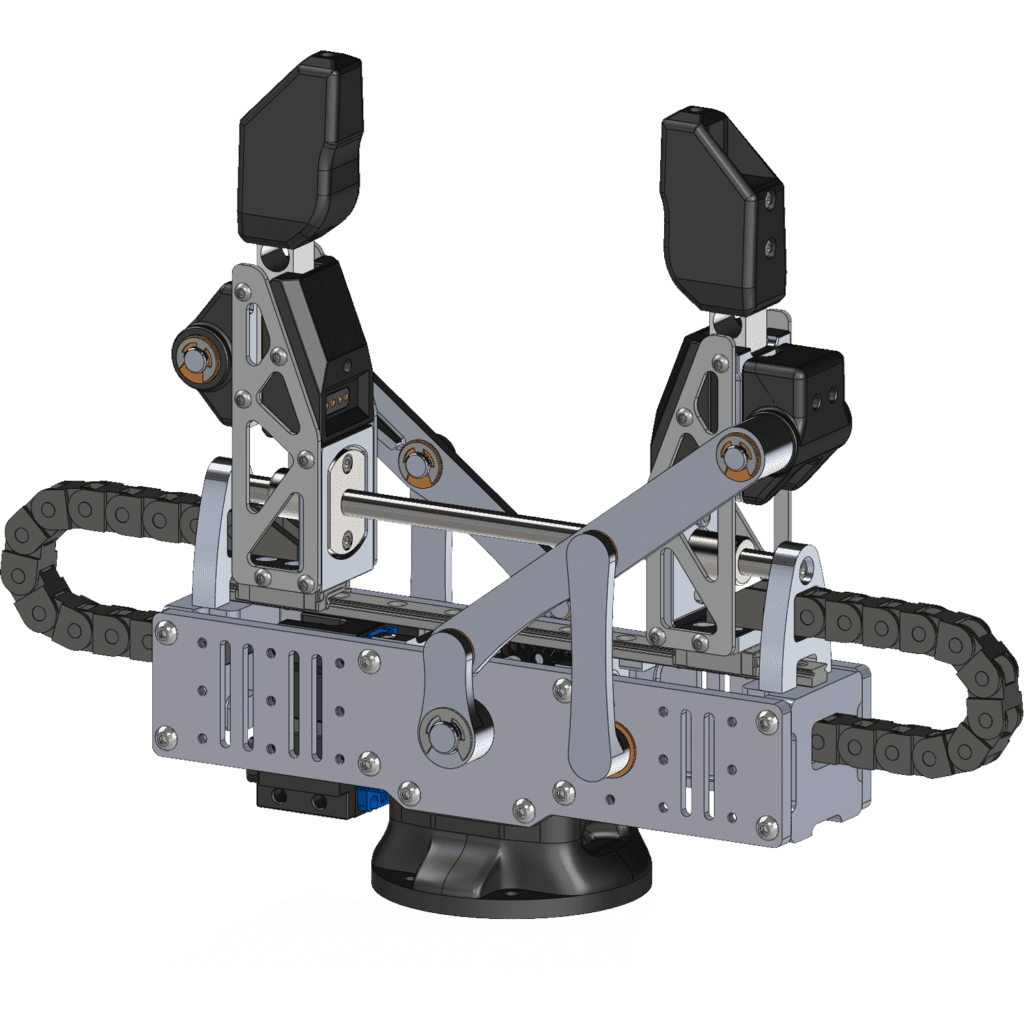
END EFFECTOR
With its powerful end effector, ARDITO is able to handle objects up to 10 kg and operate on complex panels. A camera positioned close to the fingers helps the operator during the execution of the most difficult tasks while pressure sensors positioned on the fingers allow to adjust the force the rover applies to manipulated objects, ensuring precision and delicacy during operations.
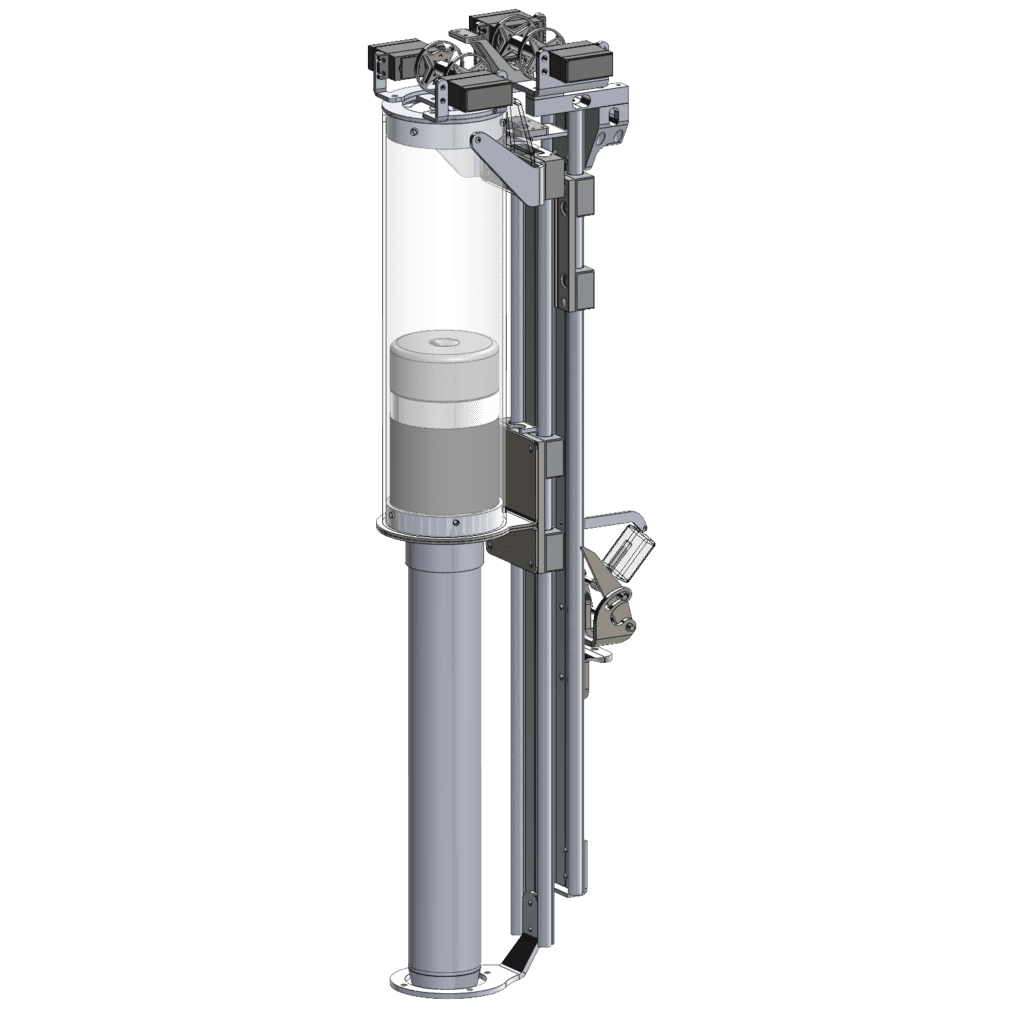
SOIL SAMPLER SYSTEM
The soil sampling system, specifically designed for deep soil sampling operations, enables Ardito to collect soil samples. This system works by using percussion to insert a probe into the ground and extract a cylindrical core of soil material from the subsurface. Once the core is removed, it is carefully transported to the surface for analysis, where it is examined in detail to determine its composition, mineral content, and geological properties.